Paper
Project Repo
Documentation and Guides
Blog Demo
In our latest paper, in collaboration with Microsoft Research, we introduce 3DB: an extendable, unified framework for debugging and analyzing vision models using photorealistic simulation. We’re releasing 3DB as a package, accompanied by extensive API documentation, guides, and demos.
Note: this post contains some interactive plots and 3D models that use JavaScript: click here for a JS-free version of this post.
Identifying failure modes and biases in vision models is a rapidly
emerging challenge in machine learning. In high-stakes
applications, simply deploying models and collecting failures that arise in
the wild is often difficult, expensive, and irresponsible. To this end, a
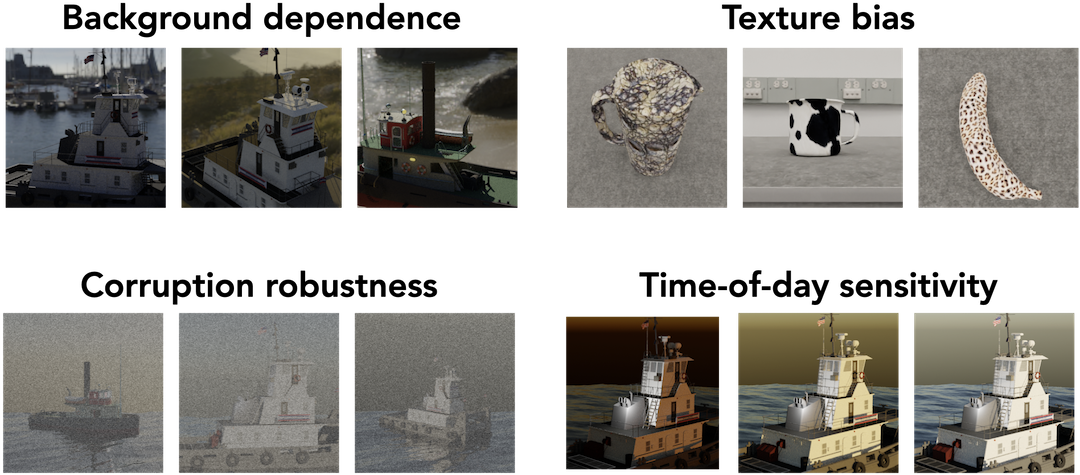
recent line of work in vision focuses on identifying model failure
modes via in-depth analyses of image transformations and
corruptions, object orientations,
backgrounds, or shape-texture conflicts. These studies
(and other similarly important ones) reveal a variety of patterns of
performance degradation in vision models. Still, performing each such study
requires time, developing
3DB: A Rendering-based Debugging Platform
In our latest paper, we try to make progress on this question and propose 3DB, a platform for automatically identifying and analyzing the failure modes of computer vision models using 3D rendering. 3DB aims to allow users to go from a testable, robustness-based hypothesis to concrete, photorealistic experimental evidence with minimal time and effort.
The platform revolves around the modular workflow pictured below. First, users specify a set of 3D objects and environments, as well as a set of 3D (or 2D) transformations called controls that determine the space of admissible object-environment configurations. 3DB then renders a myriad of admissible scenes and feeds them through the user’s computer vision model of choice. The user can finally stratify, aggregate, or otherwise analyze the results either by reading the outputted JSON, or through the pre-packaged dashboard.
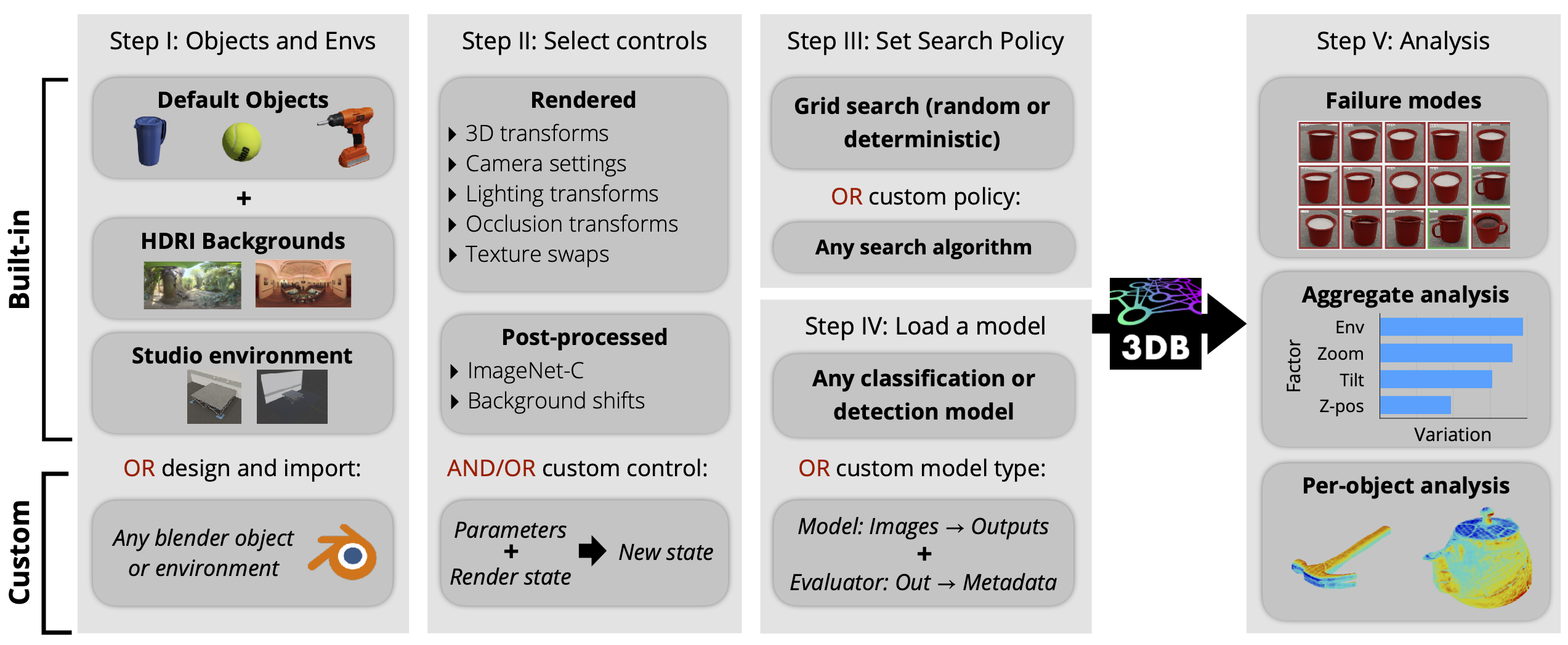
3DB easily adapts to a variety of use cases: in particular, users can modify and swap out any part of this pipeline (e.g., the renderer, the logger, the model type, or the controls) for their own custom-written components, without needing to modify any of the 3DB codebase. We’ve compiled guides, extensive API documentation, and a full demo showing how 3DB streamlines model debugging.
In fact, this blog post will double as another demo! We’ll present the (short) code necessary to reproduce every plot in the post below using 3DB. You can download the aggregated code for this blog post here.
To set up, follow the steps below—then, in the remainder of this post, press “Show/hide code and instructions” to see the steps necessary to reproduce each experiment below.
- Clone the blog demo repo
- Run
cd blog_demo
, thenbash setup.sh
(assumesunzip
is installed) to download a large Blender environment, thencd ../
- Install 3DB:
curl -L https://git.io/Js8eT | bash /dev/stdin threedb
- Run
conda activate threedb
- Our experiments below will need a
BLENDER_DATA
folder that contains two subfolders:blender_models/
containing 3D models (.blend
files with a single object whose name matches the filename), andblender_environments/
containing environments. We will provide you with these later - Separately, make a file called
base.yaml
and paste in the configuration from the next pane.
inference:
module: 'torchvision.models'
label_map: 'blog_demo/resources/imagenet_mapping.json'
class: 'resnet18'
normalization:
mean: [0.485, 0.456, 0.406]
std: [0.229, 0.224, 0.225]
resolution: [224, 224]
args:
pretrained: True
evaluation:
module: 'threedb.evaluators.classification'
args:
classmap_path: 'blog_demo/resources/ycb_to_IN.json'
topk: 1
render_args:
engine: 'threedb.rendering.render_blender'
resolution: 256
samples: 16
policy:
module: "threedb.policies.random_search"
samples: 5
logging:
logger_modules:
- "threedb.result_logging.image_logger"
- "threedb.result_logging.json_logger"
Using 3DB
Prior works have already used 3D rendering (to great effect) to study biases of machine learning models, including pose and context-based biases. Our goal is not to propose a specific 3D-rendering based analysis, but rather to provide an easy-to-use, highly extendable framework that unifies prior analyses (both 3D and 2D) while enabling users to (a) conduct a host of new analyses with the same ease and with realistic results; and (b) effortlessly compose different factors of variation to understand their interplay.
We’ll dedicate the rest of this post to illustrating how one
might actually use 3DB in practice, focusing on a single
In what follows, we will walk through example applications of 3DB to discover biases of ML models (some previously documented, others not). For the sake of brevity, we’ll highlight just a few of these (re-)discoveries—to see more, check out the paper. We’ll then demonstrate that the discoveries of 3DB transfer pretty reliably to the real world!
Our experiments will all operate on an
Image Background Sensitivity
In one of our previous posts, we continued a long line of prior work (see, e.g., here, here, here, etc.) showing that models can be over-reliant on image backgrounds, and demonstrated that they are easily broken by adversarially chosen backgrounds. To accomplish this, our prior analysis used classical computer vision tools to separate foregrounds from backgrounds, then pasted foregrounds from one image onto backgrounds from another. This process was slow and required extensive quality control to ensure that backgrounds and foregrounds were being extracted properly—and even when they were, a few artifacts remained:






3DB lets us reproduce these findings effortlessly and without introducing such artifacts. To demonstrate this, we use 3DB to render our mug 3D model on hundreds of HDRI backgrounds, resulting in images such as:










We then analyze the performance of a pretrained
A note on compositionality: An important part of 3DB that we don’t discuss here is compositionality, i.e., the ability to put together multiple controls and study their joint effect. For example, in our paper we studied how a model’s prediction vary with various zoom levels and backgrounds of an object. We found that the optimal zoom level varies a lot by background.
Show/hide code and instructions
# $BLENDER_DATA/blender_environments` contains several backgrounds and
# $BLENDER_DATA/blender_models contains the 3D model of a mug.
export BLENDER_DATA=$(realpath blog_demo)/data/backgrounds
# if you want to use the pre-written material in blog_demo, uncomment:
# cd blog_demo
# (Optional) Download additional backgrounds you want---e.g., from
# https://hdrihaven.com/hdris/ (both `.hdr` and `.blend` files work) and put
# them in BLENDER_DATA/blender_environments.
wget https://hdrihaven.com/hdris/PATH/TO/HDRI \
-O $BLENDER_DATA/blender_environments
# Direct results
export RESULTS_FOLDER='results_backgrounds'
# Run 3DB (with the YAML file from the next pane saved as `backgrounds.yaml`):
threedb_workers 1 $BLENDER_DATA 5555 > client.log &
threedb_master $BLENDER_DATA backgrounds.yaml $RESULTS_FOLDER 5555
# Analyze results in the dashboard
python -m threedboard $RESULTS_FOLDER --port 3000
# Navigate to localhost:3000 to view the results!
# Finally, run analysis using pandas (third pane)
python analyze_bgs.py
base_config: "base.yaml"
policy:
module: "threedb.policies.random_search"
samples: 20
controls:
- module: "threedb.controls.blender.orientation"
- module: "threedb.controls.blender.camera"
zoom_factor: [0.7, 1.3]
aperture: 8.
focal_length: 50.
- module: "threedb.controls.blender.denoiser"
import pandas as pd
import numpy as np
import json
log_lines = open('results_backgrounds/details.log').readlines()
class_map = json.load(open('results_backgrounds/class_maps.json'))
df = pd.DataFrame.from_records(list(map(json.loads, log_lines)))
df['prediction'] = df['prediction'].apply(lambda x: class_map[x[0]])
df['is_correct'] = (df['is_correct'] == 'True')
res = df.groupby('environment').agg(accuracy=('is_correct', 'mean'),
most_frequent_prediction=('prediction', lambda x: x.mode()))
print(res)
Texture Bias
Another recent study of neural network biases showed that in contrast to humans, convolutional neural networks (CNNs) rely more on texture to recognize objects than on shape. The example below typifies this phenomenon—a cat with an elephant texture is recognized as a cat by humans, but as an elephant by CNNs:
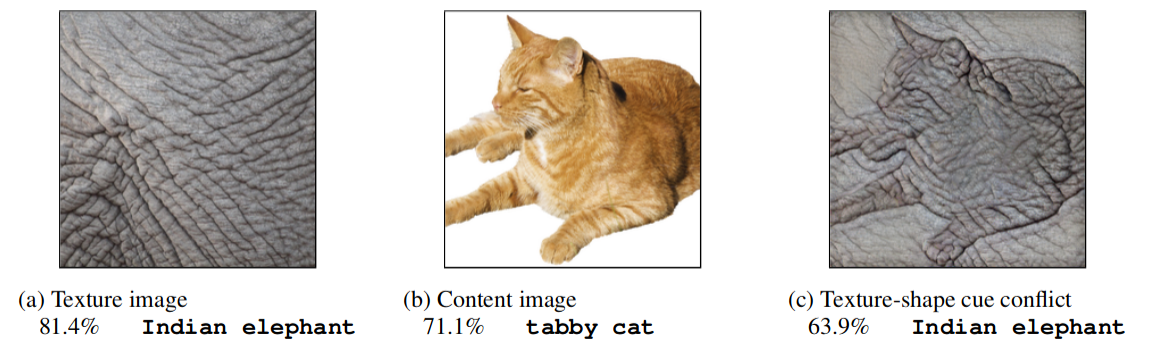
This example and others like it (dubbed ‘cue-conflict’ images) provide a striking illustration of the contrast between human and CNN-based classification mechanisms. Still, just as in the case of image backgrounds, creating such images typically necessitates time, technical skill, quality control, and/or introduction of unwanted artifacts (for example, in the above figure, ideally we would modify only the texture of the cat without altering the background).
However, using 3DB we can easily collect photorealistic empirical evidence of
texture bias. Without modifying the internal 3DB codebase at all,
one can write a custom control that modifies the texture of
objects in the scene while keeping the rest intact. With this
Average accuracy (compare to 42% on ImageNet val set)
The performance of the pretrained model on mugs (and other objects) deteriorates severely upon replacing the mug’s texture with a “wrong” one, providing clear corroborating evidence of the texture bias! We noticed in our experiments that for some textures (e.g., zebra), the coffee mug was consistently misclassified as the corresponding animal, whereas for others (e.g., crocodile), the mug is misclassified as either a related class (e.g., turtle or other reptile), or as an unrelated object (e.g., a trash can).
Show/hide code and instructions
# ${BLENDER_DATA}/blender_environments contains several backgrounds,
# ${BLENDER_DATA}/blender_models contain the 3D model of a mug.
export BLENDER_DATA=$(realpath blog_demo)/data/texture_swaps
# List the materials that we will use for this post:
ls blog_demo/data/texture_swaps/blender_control_material
# You can also make or download blender materials corresponding
# to other textures you want to test, and add them to that folder
# if you want to use the pre-written material in blog_demo, uncomment:
# cd blog_demo
export RESULTS_FOLDER=results_texture
# Run 3DB (with the YAML file from the next pane saved as texture_swaps.yaml):
threedb_workers 1 $BLENDER_DATA 5555 > client.log &
threedb_master $BLENDER_DATA texture_swaps.yaml $RESULTS_FOLDER 5555
# Analyze results in the dashboard
python -m threedboard $RESULTS_FOLDER --port 3000
# Navigate to localhost:3000 to view the results!
# Finally, run analysis using pandas (copy from third pane)
python analyze_ts.py
base_config: "base.yaml"
controls:
- module: "threedb.controls.blender.orientation"
rotation_x: -1.57
rotation_y: 0.
rotation_z: [-3.14, 3.14]
- module: "threedb.controls.blender.position"
offset_x: 0.
offset_y: 0.5
offset_z: 0.
- module: "threedb.controls.blender.pin_to_ground"
z_ground: 0.25
- module: "threedb.controls.blender.camera"
zoom_factor: [0.7, 1.3]
view_point_x: 1.
view_point_y: 1.
view_point_z: [0., 1.]
aperture: 8.
focal_length: 50.
- module: "threedb.controls.blender.material"
replacement_material: ["cow.blend", "elephant.blend", "zebra.blend", "crocodile.blend", "keep_original"]
- module: "threedb.controls.blender.denoiser"
import pandas as pd
import numpy as np
import json
log_lines = open('results_texture/details.log').readlines()
class_map = json.load(open('results_texture/class_maps.json'))
df = pd.DataFrame.from_records(list(map(json.loads, log_lines)))
df = df.drop('render_args', axis=1).join(pd.DataFrame(df.render_args.values.tolist()))
df['prediction'] = df['prediction'].apply(lambda x: class_map[x[0]])
df['is_correct'] = (df['is_correct'] == 'True')
res = df.groupby('MaterialControl.replacement_material').agg(acc=('is_correct', 'mean'),
most_frequent_prediction=('prediction', lambda x: x.mode()))
print(res)
Part-of-Object Attribution
Beyond general hypotheses about model biases, 3DB allows us to test vision systems on a more fine-grained level. In the case of our running mug example, for instance, we can use the platform to understand which specific parts of its 3D mesh correlate with classifier accuracy. Specifically, below we generate (and classify) scenes with random mug positions, rotations, and backgrounds. Since 3DB stores texture-coordinate information for each rendering, we can reconstruct a three-dimensional heatmap that encodes, for each point on the surface of the mug, the classifier’s accuracy conditioned on that point being visible:
A number of phenomena stand out from this heatmap, including:
- The classifier is worse when the side of the mug opposite the handle is seen.
- The classifier is more accurate when the bottom rim is visible.
- The classifier performs worst when the inside of the mug is visible.
Show/hide code and instructions
# point BLENDER_DATA to the environments and models for this experiment
export BLENDER_DATA=$(realpath blog_demo)/data/part_of_object
# if you want to use the pre-written material in blog_demo, uncomment:
# cd blog_demo
# Optionally: download additional backgrounds (`.hdr` or `.blend`) e.g.,
wget URL -O $BLENDER_DATA/blender_environments/new_env.hdr
# Point results folder to where you want output written
export RESULTS_FOLDER='results_part_of_object'
# Run 3DB (with the YAML file from the next pane):
threedb_workers 1 $BLENDER_DATA 5555 > client.log &
threedb_master $BLENDER_DATA part_of_object.yaml $RESULTS_FOLDER 5555
# Analyze results in the dashboard
python -m threedboard $RESULTS_FOLDER --port 3000
# Navigate to localhost:3000 to view the results!
# Run `part_of_object.py` (third pane) to generate the heat map of the mug.
python po_analysis.py
base_config: "base.yaml"
policy:
module: "threedb.policies.random_search"
samples: 20
render_args:
engine: 'threedb.rendering.render_blender'
resolution: 256
samples: 16
with_uv: True
controls:
- module: "threedb.controls.blender.orientation"
rotation_x: -1.57
rotation_y: 0.
rotation_z: [-3.14, 3.14]
- module: "threedb.controls.blender.camera"
zoom_factor: [0.7, 1.3]
view_point_x: 1.
view_point_y: 1.
view_point_z: 1.
aperture: 8.
focal_length: 50.
- module: "threedb.controls.blender.denoiser"
- module: "threedb.controls.blender.background"
H: 1.
S: 0.
V: 1.
import pandas as pd
import numpy as np
import json
from PIL import Image
DIR = 'results_part_of_object'
log_lines = open(f'{DIR}/details.log').readlines()
df = pd.DataFrame.from_records(list(map(json.loads, log_lines)))
# From class index to class name (for readability)
class_map = json.load(open(f'{DIR}/class_maps.json'))
df['prediction'] = df['prediction'].apply(lambda x: class_map[x[0]])
# We'll be a little lenient here to get a more interesting heatmap
df['is_correct'] = df['prediction'].isin(['cup', 'coffee mug'])
uv_num_correct = np.zeros((256, 256))
uv_num_visible = np.zeros((256, 256))
for imid in df["id"].unique().tolist():
is_correct = float(df.set_index('id').loc[imid]['is_correct'])
vis_coords_im = Image.open(f'{DIR}/images/{imid}_uv.png')
vis_coords = np.array(vis_coords_im).reshape(-1, 3)
# R and G channels encode texture coordinates (x, y),
# B channel is 255 for object and 0 for background
# So we will filter by B then only look at R and G.
vis_coords = vis_coords[vis_coords[:,2] > 0][:,:2]
uv_num_visible[vis_coords[:,0], vis_coords[:,1]] += 1.
uv_num_correct[vis_coords[:,0], vis_coords[:,1]] += is_correct
# Accuracy = # correct / # visible
uv_accuracy = uv_num_correct / (uv_num_visible + 1e-4)
# Saves a black-and-white heatmap
Image.fromarray((255 * uv_accuracy).astype('uint8'))
Now that we have hypotheses regarding model performance, we can test them! Inspecting the ImageNet validation set, we found that our classifier indeed (a) struggles on coffee mugs when the handle is not showing (providing a feasible explanation for (1), since the side opposite the handle is only visible when the handle itself isn’t), and (b) performs worse at higher camera angles (providing a plausible explanation for (2)). We want to focus, however, on the third phenomenon, i.e., that the classifier performs quite poorly whenever the inside of the mug is visible. Why could this be the case? We can use 3DB to gain insight into the phenomenon. Specifically, we want to test the following hypothesis: when classifying mugs, does our ImageNet model rely on the exact liquid inside the cup?
We investigate this hypothesis by writing a custom control that fills our mug with various liquids (more precisely, a parameterized mixture of water, milk, and coffee):
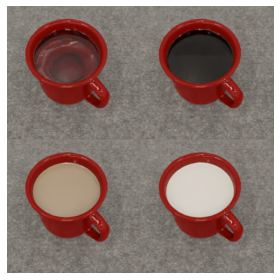
In contrast to the last experiment (where we varied the orientation of the mug), we render scenes containing the mug in a fixed set of poses that reveal the contents—just as in the last experiment, however, we still vary background and mug location. We visualize the results below—each cell in the heatmap corresponds to a fixed mixture of coffee, water, and milk (i.e., the labeled corners are 100% coffee, 100% milk, and 100% water, and the other cells are linear interpolations of these ratios) and the color of the cell encodes the relative accuracy of the classifier when the mug is filled with that liquid:
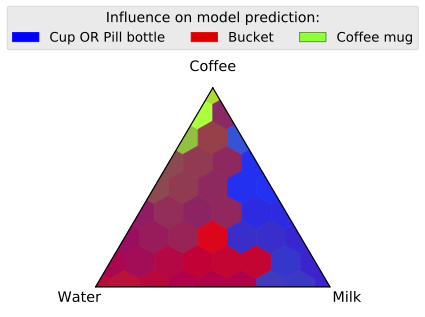
It turns out that mug content indeed highly impacts classification: our model is much less likely to correctly classify a mug that doesn’t contain coffee! This is just one example of how 3DB can help in proving or disproving hypotheses about model behavior.
From Simulation to Reality
So far, we’ve used 3DB to discover ML models’ various failure modes and biases via photorealistic rendering. To what extent though do the insights gleaned from simulated 3DB experiments actually “transfer” to the physical world?
To test such transferability, we began by creating a 3D model of a physical room we had access to. We also collected eight different 3D models with closely matching physical world counterparts—including the mug analyzed above. Next, we used 3DB to find correctly and incorrectly classified configurations (pose, orientation, location) of these eight objects inside that room. Finally, we replicated these poses (to the best of our abilities) in the physical room, and took photos with a cellphone camera:

We classified these photos with the same vision model as before and measured how often the simulated classifier correctness matched correctness on the real photographs. We observed an ~85% match! So the failure modes identified by 3DB are not merely simulation artifacts, and can indeed arise in the real world.
Conclusion
3DB is a flexible, easy-to-use, and extensible framework for identifying model failure modes, uncovering biases, and testing fine-grained hypotheses about model behavior. We hope it will prove to be a useful tool for debugging vision models.
Bonus: Object Detection, Web Dashboard, and more!
We’ll wrap up by highlighting some additional capabilities of 3DB that we didn’t get to demonstrate in this blog post:
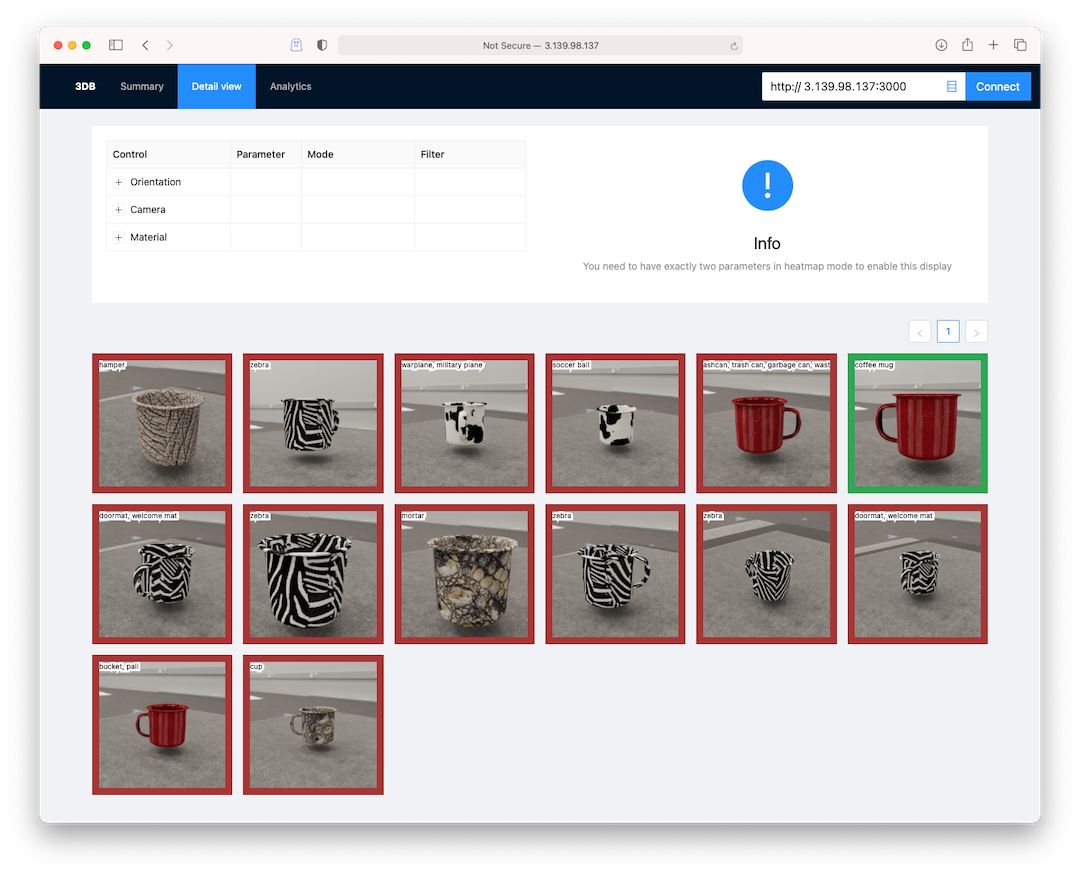
3DBoard: a web interface for exploring results
In all of the code examples above, we showed how to analyze the results of a 3DB
experiment by loading the output into a pandas dataframe. For additional
convenience, however, 3DB also comes with a web-based dashboard for exploring
experimental results. The following command suffices to visualize the texture swaps experiment from earlier:
python -m threedboard results_texture/ --port 3000
Navigating to YOUR_IP:3000 should lead you to a page that looks like this:
Object detection and other tasks
In this blog post, we focused on using 3DB to analyze image classification models. However, the library also supports object detection out-of-the-box, and can easily be extended to support a variety of image-based tasks (e.g., segmentation or regression-based tasks). For example, below we provide a simple end-to-end object detection example:
Show/hide code and instructions
# The object detection example is separate from the rest of the blog demo, so
# run the following in a separate repo:
git clone https://github.com/3db/object_detection_demo
# The repo has a data/ folder containing the Blender model (a banana) and some
# HDRI backgrounds, a classmap.json file mapping the UID of the model to a COCO
# class, and the detection.yaml file from the next pane.
cd object_detection_demo/
export BLENDER_DATA=data/
export RESULTS_FOLDER=results/
# Run 3DB
threedb_workers 1 $BLENDER_DATA 5555 > client.log &
threedb_master $BLENDER_DATA detection.yaml $RESULTS_FOLDER 5555
# Analyze results in the dashboard
python -m threedboard $RESULTS_FOLDER --port 3000
# Navigate to localhost:3000 to view the results!
inference:
module: 'torchvision.models.detection'
class: 'retinanet_resnet50_fpn'
label_map: './resources/coco_mapping.json'
normalization:
mean: [0., 0., 0.]
std: [1., 1., 1.]
resolution: [224, 224]
args:
pretrained: True
evaluation:
module: 'threedb.evaluators.detection'
args:
iou_threshold: 0.5
nms_threshold: 0.1
max_num_boxes: 10
classmap_path: 'classmap.json'
render_args:
engine: 'threedb.rendering.render_blender'
resolution: 256
samples: 16
with_segmentation: true
policy:
module: "threedb.policies.random_search"
samples: 2
logging:
logger_modules:
- "threedb.result_logging.image_logger"
- "threedb.result_logging.json_logger"
controls:
- module: "threedb.controls.blender.orientation"
- module: "threedb.controls.blender.camera"
zoom_factor: [0.7, 1.3]
aperture: 8.
focal_length: 50.
- module: "threedb.controls.blender.denoiser"